Dinky (ESAP ROBO)
Dinky is the xylophone-playing robot that we designed for the Robotics course at Engineering Summer Academy at University of Pennsylvania, instructed by Prof. Mark Yim. At the end of the three week program, we were able to synchronously (via WiFi) play two songs.
Design Process

Critical Functions
This documents our initial idea for how the robot is going to play the xylophone, where we defined the critical functions of this robot and planned out step by step how we are going to make Dinky.
Planning & Prototyping
First Prototype!
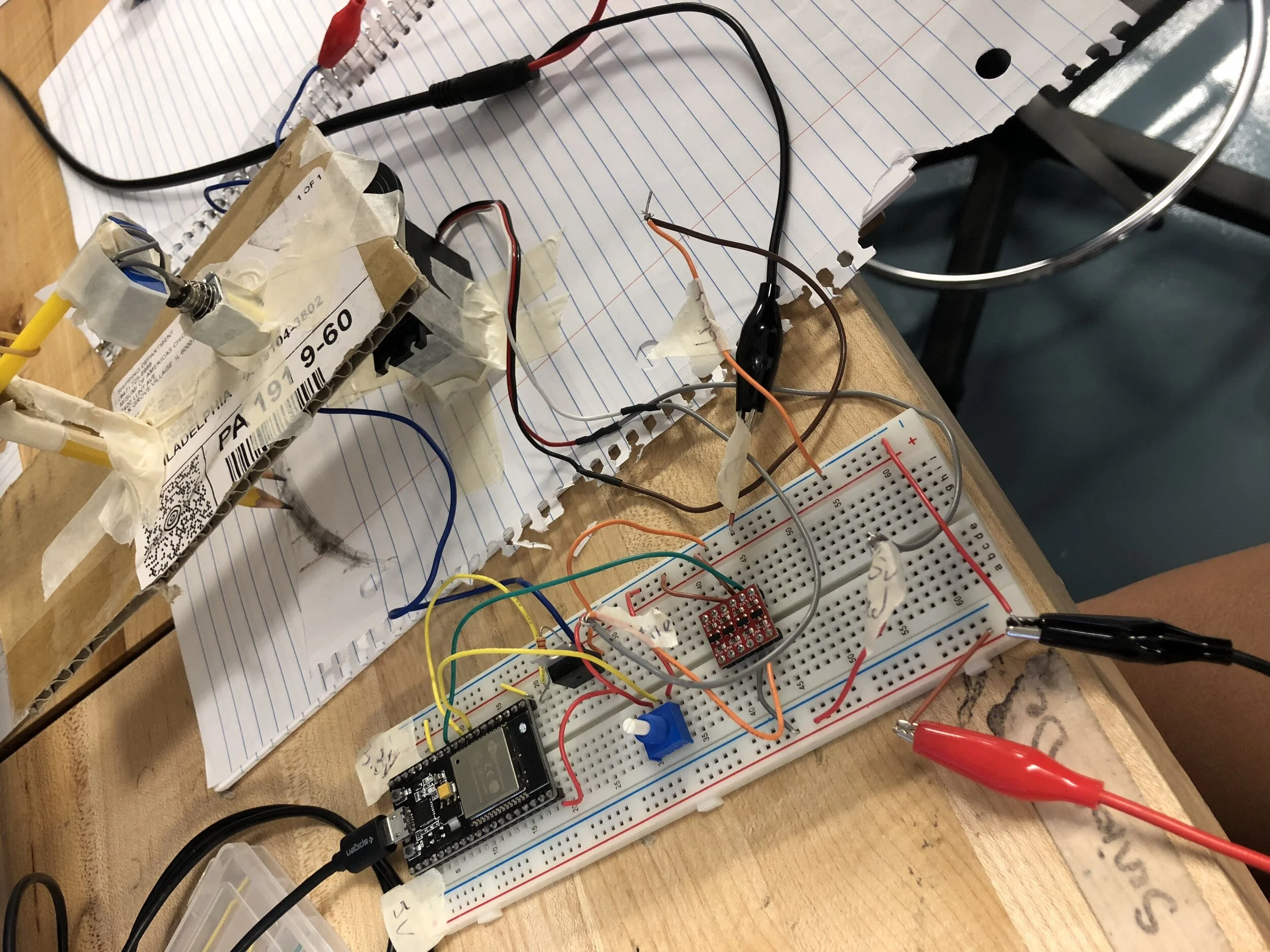
This was our proof of concept, with cardboard, lots of tapes, and lots of hot glues. But hey, it works!

Circuit Board Planning
After the initial planning when defining critical functions, we went more in detail to plan out the electronic component of Dinky.
First Song!
After developing Dinky with laser cut and 3D printed materials instead of cardboard and tapes, we tested it with the Happy Birthday song in other to further debug and adjust the mallet positions for each key.







Final Presentation
As a class, we were able to play two songs at the end of the three weeks. On the left is a video of us playing Baba O’Riley by The Who (original version), and on the right is us playing Polaroid by Imagine Dragons (instrument closeup edited version).


At the end of the three weeks, we are more than just teammates… we’re family.







